 Automotive
Automotive Batérie
Batérie Bioprocesy a bioreaktory
Bioprocesy a bioreaktory Čisté priestory
Čisté priestory Dátové centrá
Dátové centrá Drevárstvo a papierenstvo
Drevárstvo a papierenstvo Energetika
Energetika Farmácia a medicína
Farmácia a medicína Hutníctvo a horníctvo
Hutníctvo a horníctvo HVAC a kvalita vnútorného vzduchu
HVAC a kvalita vnútorného vzduchu Chémia a petrochémia
Chémia a petrochémia Obnoviteľné zdroje
Obnoviteľné zdroje Palivové články
Palivové články Polohovanie a robotika
Polohovanie a robotika Polovodiče
Polovodiče Potravinárstvo a nápoje
Potravinárstvo a nápoje Skladovanie
Skladovanie Sklárstvo
Sklárstvo Strojárstvo
Strojárstvo Doprava a logistika
Doprava a logistika Veda a výskum
Veda a výskum Vodík
Vodík Vodné hospodárstvo
Vodné hospodárstvo Poľnohospodárstvo
Poľnohospodárstvo Životné prostredie
Životné prostredie ADARO
ADARO
 Alco Valves Group
Alco Valves Group
 Crystal Pressure
Crystal Pressure
 AP Tech
AP Tech
 BEKA associates
BEKA associates
 Bronkhorst
Bronkhorst
 CPC
CPC
 Eaton-Azonix
Eaton-Azonix
 Eaton-Gecma
Eaton-Gecma
 Eaton-MEDC
Eaton-MEDC
 Eaton-MTL
Eaton-MTL
 EKO Instruments
EKO Instruments
 Expo
Expo
 Ham-Let (UCT)
Ham-Let (UCT)
 HIMA
HIMA
 KSR Kuebler
KSR Kuebler
 Kytola
Kytola
 Mott Corporation
Mott Corporation
 Multi Instruments
Multi Instruments
 Muetec
Muetec
 TecSense
TecSense
 Valex
Valex
 Systec Controls
Systec Controls

Rozdíl mezi inkrementálním a absolutním rotačním enkodérem
Kategórie článku
Zodpovedajúce kategórie tovaru
Súvisiaci výrobca
Relevantné produkty
- Inkrementální enkodéry WDG, WDGI a WDGP s hřídelí
- Inkrementální enkodéry WDG, WDGI a WDGP s dutou hřídelí
- Absolutní enkodéry WDGA (CANopen a CANopen LIFT)
- Absolutní enkodéry WDGA (SSI, RS485, SAE J1939 a PROFIBUS)
- Absolutní enkodéry WDGA (PROFINET-IO, EtherCAT, EtherNet/IP a Universal-IE)
- Inkrementální enkodéry WDGN konfigurovatelné přes NFC
V automatizaci a dnes vlastně již v téměř všech průmyslových odvětvích, kde se využívají pohony, je nutné zajistit přesné měření polohy a otáček hřídele, délek a nebo úhlů natočení tak, aby bylo možné přesně řídit dané aplikace. V případě použití krokových motorů je možné přímo předem přesně určit a řídit pohyb, úhel natočení nebo rychlost otáčení bez nutnosti zpětné kontroly. U ostatních typů motorů je nutné použít systém zpětné vazby, kdy se prakticky naslepo a nepřesně řídí pohyb motoru a až zpětně se vyhodnocuje o kolik, resp. jak moc nebo jak rychle se vlastní pohyb uskutečnil. Existuje mnoho metod jak tento pohyb vyhodnotit, jednou z nich je použití tzv. rotačních enkodérů. Jsou to elektromechanické převodníky, které převádí rotační pohyb na sekvence elektrických digitálních impulzů. Dle principu snímání je můžeme rozdělit na optické a magnetické, a dle poskytované informace na inkrementální (přírůstkové) a absolutní.

Inkrementální enkodéry WDGI a WDGP
Inkrementální enkodéry pracují v rámci jedné otáčky (360°) a tím končí, další otáčky jsou přičítány jako přírůstky k původním hodnotám, enkodér si tak při výpadku napájení nepamatuje svoji původní pozici. Společnost Wachendorff Automation využívá pro své inkrementální enkodéry dva principy měření – optický a magnetický, obě metody jsou bezkontaktní, během procesu tedy nedochází k opotřebení enkodéru.
Optické inkrementální enkodéry
U optických enkodérů je světlo z vysoce výkonné LED diody rovnoběžně rozptýleno pomocí čočky a prosvítá přes clonu a pulzní kotouč. Clona je integrována v přírubě, pulzní kotouč je namontován na hřídeli z nerezové oceli, která je díky speciálním ložiskům bez vůle. Pokud se hřídel otáčí, pak kombinace apertury clony a pulzního kotouče způsobí otevírání a zavírání definovaných polí. Buď se světlo mřížkou propustí, nebo ne. Toto uspořádání znamená, že jsou detekovány dva signály, fázově posunuté o 90° a nulový (indexový) pulz. Rozdíl mezi světlem a tmou je detekován přijímacími tranzistory, pracujícími diferenciálně, namontovanými na desce plošných spojů na opačné straně. Z toho elektronické obvody předzpracovávají vysoce přesné signály a poté je zesilují do průmyslově využitelných pulzních forem, například sinusových nebo obdélníkových, HTL nebo TTL a jejich invertovaných protějšků.
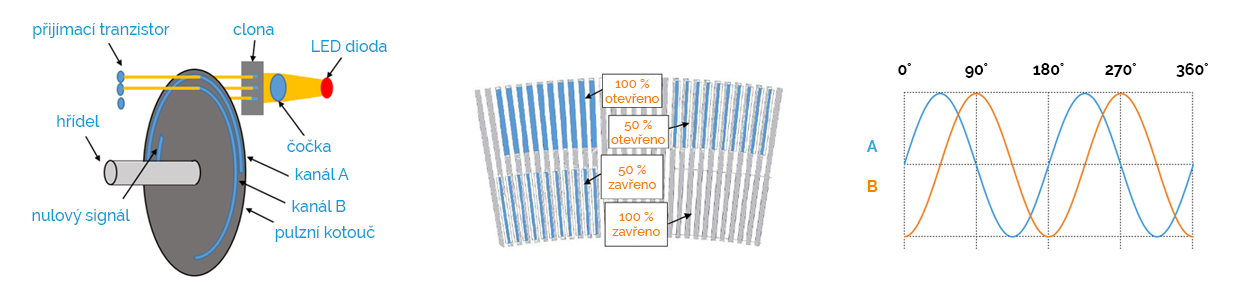
Schéma optického rotačního enkodéru
Magnetické inkrementální enkodéry
Na hřídeli z nerezové oceli s uložením v ložiscích bez vůle je namontován na jejím konci uvnitř enkodéru diametrálně polarizovaný magnet. Pokud se hřídel otáčí, magnet a magnetické pole se otáčí spolu s ním. Tato změna magnetického pole je detekována a zpracovávána Hallovým senzorem na protější desce plošných spojů. Vyhodnocení umožňuje generovat signály, které jsou fázově posunuté o 90° stejně tak jako nulový impulz. Elektronika tyto signály následně upravuje a zesiluje do průmyslově použitelných obdélníkových pulzů v HTL nebo TTL a jejich invertovaných protějšků.
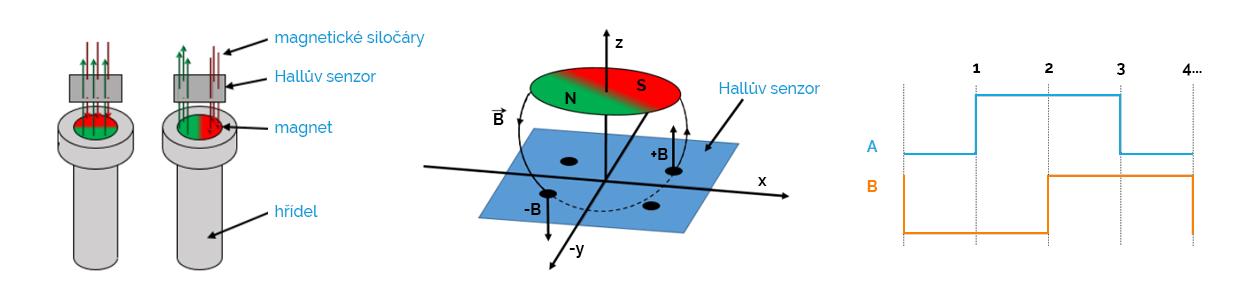
Schéma magnetického rotačního enkodéru
Absolutní enkodéry WDGA
Absolutní rotační enkodér je snímač, který umí pracovat s počtem otáček a zároveň umí říct, kde přesně se v rámci otáčky (360°) v danou chvíli nachází. Při výpadku napájení tak umí navázat na informaci o své poloze a pokračovat ve snímaní. Absolutní enkodéry se dělí na jednootáčkové a víceotáčkové, které poskytují unikátní informaci o poloze i v rámci více otáček. Společnost Wachendorff Automation pro své absolutní enkodéry používá magnetický princip měření se dvěma patentovanými technologiemi QuattroMag® a EnDra®.
Jednootáčková technologie QuattroMag®
Technologie je založena na čtyřech Hallových senzorech použitých společně s patentovaným výpočtovým algoritmem, který vypočítává magnetické pole generované diametrálně děleným magnetem namontovaným na čele hřídele enkodéru takovým způsobem, že jakékoli rušení mezi Hallovými signály a okolím je nemožné. Technologie tak může měřit úhlovou polohu a otáčky přesněji a rychleji než konvenční senzory ve vysoce přesných a dynamických aplikacích, ve kterých šlo doposud používat pouze absolutní snímače založené na optickém principu.
Víceotáčkové enkodéry jsou navíc vybaveny technologií EnDra®, která počítá a ukládá jednotlivé otáčky pomocí Wiegandova snímače, i když je bez napětí, protože využívá principu sbírání energie z rotace. I zde patentovaný proces umožňuje přesné a spolehlivé zpracování signálu. V kombinaci jsou tyto dvě technologie téměř nepřekonatelné, obě jsou bezkontaktní, a tedy bez opotřebení a pohyblivých částic jako jsou např. ozubená kola. Díky tomu, že enkodér nemá baterii, je zcela bezúdržbový.
Víceotáčková technologie EnDra®
EnDra = energetický drát, čímž je míněn Wiegandův drát, je feromagnetická slitina z kobaltu, železa a vanadu, která se skládá z tvrdého magnetického pouzdra a měkkého magnetického jádra. Pokud se pole magnetu pohybuje podél Wiegandova drátu otáčením hřídele, měkké magnetické jádro je nuceno sledovat pole, omezené tvrdým magnetickým pouzdrem. Je-li magnet přiblížen k drátu, vnější plášť s vysokou koercitivitou vylučuje magnetické pole z vnitřního měkkého jádra, dokud není dosaženo magnetického prahu, načež celý vodič – jak vnější plášť, tak vnitřní jádro – rychle přepíná polaritu magnetizace. Tento impulz, který je nezávislý na rychlosti, se generuje dvakrát za otáčku a pomocí cívky se převádí na elektrické impulzy. Tyto impulzy generují dostatek energie pro provoz nízkoenergetické paměti FRAM a poskytují informaci o počtu otáček.
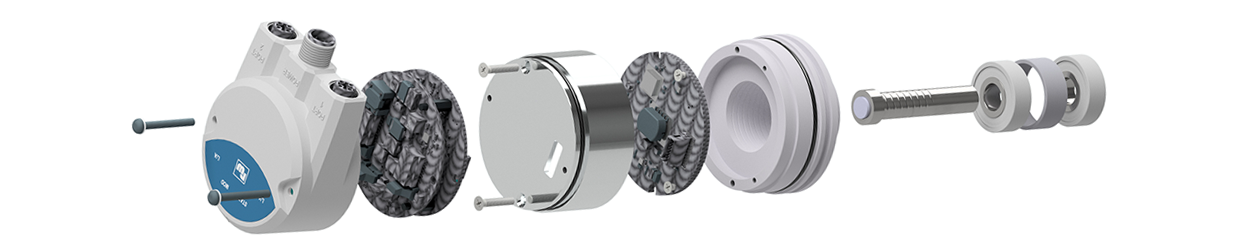
Schematický rozklad absolutního PROFINET enkodéru
Pokud jde o enkodéry Wachendorff Automation, pouze magnetické řešení je dost dobré na to, aby splňovalo oba základní požadavky, jednootáčkový k určení počtu kroků a víceotáčkový pro čítač otáček. Přes svou kompaktní konstrukci překonávají enkodéry WDGA vysoký faktor v optických systémech s technologií pohonu. Výstupem jsou pak digitální signály komunikačních protokolů SSI, RS485, SAE J1939, Profibus, CANopen, CANopen LIFT, Profinet, EtherCAT, EtherNet/IP a nebo také univerzální Industrial Ethernet, kde si zákazník může zvolit komunikační protokol dle potřeby jednoduchým nahráním požadovaného firmware.
Výhody a nevýhody
Optický princip
citlivý na okolní vlivyvysoké rozlišení a přesnostodolnost vůči působení silných magnetických polí


Magnetický princip
možné ovlivnění působením silných magnetických polínižší přesnost v porovnání s optickým principemomezené rozlišenínecitlivý na okolní vlivyjednodušší konstrukce
Kam ďalej?
Môžete si pozrieť naše ďalšie články, prípadne si prejsť kategórie súvisiace s týmto článkom (Meranie polohy, otáčok, dĺžok a uhlov natočenia), alebo si prezrieť relevantné produkty (Inkrementální enkodéry WDG, WDGI a WDGP s hřídelí, Inkrementální enkodéry WDG, WDGI a WDGP s dutou hřídelí, Absolutní enkodéry WDGA (CANopen a CANopen LIFT), Absolutní enkodéry WDGA (SSI, RS485, SAE J1939 a PROFIBUS), Absolutní enkodéry WDGA (PROFINET-IO, EtherCAT, EtherNet/IP a Universal-IE), Inkrementální enkodéry WDGN konfigurovatelné přes NFC). Viac informácií a zoznam všetkých produktov nájdete na stránke výrobcu .
Ak potrebujete viac informácií alebo nám chcete niečo povedať, neváhajte sa obrátiť priamo na nášho odborníka, a to buď prostredníctvom formulára, alebo emailom.










